摘要:基于无人机摄影测量技术的飞速发展与成熟,在各行各业中的应用越来越广泛。本文首先针对无人机航测技术发展进行了简要分析,其后详细探讨了无人机航测系统组成与应用基本流程,最后围绕具体案例分析了无人机航测在水利工程中的应用情况,以期可供参考。
Abstract: Based on the rapid development and maturity of UAV photogrammetry technology, it is more and more widely used in all walks of life. This paper first briefly analyzes the development of UAV aerial survey technology, and then discusses the basic process of the composition and application of the UAV aerial survey system in detail.
关键词:无人机航测;系统组成;基本流程;水利工程;应用案例
Key words: UAV aerial survey;system composition;basic process;hydraulic engineering;application case
0 引言
无人机摄影测量系统是近年来出现的一项新兴测量 技术,作为一项空间数据获取的重要手段,可以实现影像 的实时传输、高危地区探测,具有技术灵活、成本低、高效 等优点。近年来,无人机航测凭借着诸多优势在水利工程 领域得到了广泛的应用,本文主要围绕此展开详细分析。
1 无人机航测技术发展概述
20 世纪 70 年代末,Przybilla 和 Wester-Ebbinghaus 将 摄像装置搭载到无人飞机中,第一次将无人机系统运用在 摄影测绘中,然而并没有取得试验前预想到的理想效果, 却也为无人机的用途开发提供了一个新的方向,这也是摄 影测量史上的一次伟大革命,是一个巨大的转折点,意味 着无人机航测时代的来临。 2003 年我国顶尖测绘研究所成功研究并开发了低空 无人机遥感系统“UAVRS-Ⅱ”;通过利用该遥感系统获得 了某一试验区的影像成果,利用该成果完成了试验区 DOM(数字正射影像)和 DLG(数字线划图)的制作,这也 成为我国无人机摄影测量系统的先驱者。2010 年,我国首 次将小型无人机摄影技术应用于大比例尺测图中,取得了 圆满成功,随后我国不断有学者开始研究无人机航测技术 在工程测绘中的应用,并得到一些可行性方案,如:有学者 将图鹰 X-100 低空无人机摄影测量系统运用到某一区域 1∶2000 大比例尺测图的实例研究中,对实例研究中出现的 一些关键性问题和难题进行了说明并提供了解决方法,最 后还对制作的成果进行了精度分析,通过查看精度分析的 成果验证了无人机低空摄影测量系统在 1∶2000 比例尺测 图中的应用是成功可行的。总的来说,无人机测绘技术已 然成为研究热点,并且在测绘作业任务中使用也越来越广 泛,如:资源和环境监测、城市规划建设、公路勘察设计、水 利工程建设和应急测绘保障等领域。本文主要就无人机航 测在水利工程中的应用展开详细分析。
2 无人机航测系统组成与应用基本流程
2.1 无人机航测系统组成
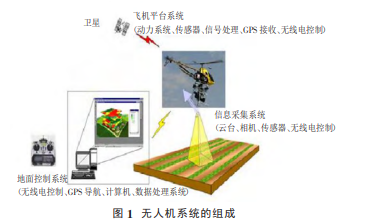
无人机航空摄影测量系统利用无人机作为承载平台, 集成航测任务所需的各种设备和装置,可快速获取视频、 影像、位姿信息等数据,具有便捷灵活、成本低、精度高、可 实时观测等诸多优势。无人机系统主要有三个方面组成 (见图 1):
①飞行平台:包括无人机机身、飞行动力装置以 及飞行控制装置,其中,大多数固定翼无人机机身材料使 用的是一些高强度、高质量的物质材料,多旋翼无人机一 般采用新型材料碳纤维材质;大型无人机一般采用燃油方 式提供动力,而小型无人机供电方式最为常见的是由锂电 池进行供电,但由于锂电池储存电量有限,因此续航问题 依旧是制约小型无人机发展的一大难题;飞行控制装置是 整个飞行平台的核心,发挥着控制无人机起降、飞行轨迹 的作用。
②信息采集系统:通过无人机自带相机或者外接 相机进行拍照完成像片数据的采集。
③地面控制系统:包 括显示屏幕、控制系统(可根据情况来切换为手动模式和 自动模式)以及数据传输系统。
2.2 无人机航测技术应用基本流程
根据测绘任务所选的无人机类型的不同和目标区域 的具体地形特征差异,无人机影像数据的获取流程也会随之变化,一般情况下主要包括:飞行任务规划、现场作业、 数据检查、数据处理等主要步骤。
2.2.1 飞行任务规划
任务规划是现场作业之前的准备工作,包括收集目标 区域的气候和地形情况等资料内容,根据所需影像和最终 数据产品所需的分辨率和精度,确定影像的地面分辨率 (GSD)、无人机飞行高度、影像重叠度以及规划航线路径 等项目内容。 ①确定现场任务时间和大致范围:收集目标区域近期 的气象数据、详细地形影像以及最新禁飞政策等。根据近 期气象数据和天气预报,确定适宜的现场数据采集时间: 根据目标区域的地形影像数据,如谷歌、高德地图等,可以 对工作区域进行初步的规划;最后根据最新的无人机禁飞 空域,确定大致的现场作业范围。②确定影像的地面分辨 率:影像的地面分辨率是数据采集之前需要确定的一项重 要参数,分辨率越高影像上能然识别的地物细节越鲜尽, 但同时需要采集的数据量越大,因此在确定地面分辨率的 时候,应将测区的地形环境条件、在不同比例尺下航片的 要求以及影像的用途等因素考虑在内。③规划无人机飞行 高度:无人机进行航测时,根据影像地面分辨率 GSD、相机 的焦距 f 以及像元尺寸 p,可以确定飞行高度 H,其关系如 下式所示: 。④确定图像重叠度:为保证绘制 地形图的准确度,应确保航摄所得相片的重叠度在一定范 围内。同一条航线上拍摄所得相邻的相片,其重叠度称为 航向重叠度,应控制在 60%~65%范围之内,最低不能小于 53%。相邻的两条航线之间拍摄所得的相片,其重叠度称 为旁向重叠度,应控制在 30%~35%范围之内,最低不能小 于 15%。⑤确定航线路径:已知图像重叠度、像幅尺寸和飞 行航高,可计算摄影基线的长度,即两相机中心之间的距 离;在垂直于航线方向上,可计算摄影基线的长度即为两 条相邻航线之间的距离,在航线方向上,可通过摄影基线 的长度和无人机飞行速度可以确定相机曝光时间的间隔。
2.2.2 现场作业
现场作业主要包括无人机图像数据采集和地面控制 点量测。无人机图像采集需要考虑现场天气和周围环境对 作业的影响,一般选择较少云或者无云的天气。无人机的 起降点要选择较空旷的平地,四周无高大建筑物和树木遮 挡,卫星 GPS 信号良好即可。无人机航拍工作流程如下: ①现场踏勘。在拍摄前需事先熟悉场地及其周边的情况, 通过现场踏勘调整航线,如果踏勘后发现存在问题,需要 对初始设定航线进行调整,完成之后进行航拍工作。②设 备检查。无人机起飞之前需要进行设备检查与调试,包括 GPS 搜星情况、指南针、电池电量、相机镜头和云台活动情 况等。③控制点量测:控制点量测工作中,需要选定合适的 控制点位置,一般选择细小线状地物的交点、明显地物拐 角点或者较小的点状地物中心,在影像上比较明显,易于 判读和量测,同时需要保证控制点周围高程起伏较小且常 年相对固定。对于无明显地物点的区域,可以使用喷涂标 志或自制标志物的方式来确定控制点。选定地面控制点之 后,利用 RTK 进行量测获取控制点的大地坐标。④航拍工 作。确定设备无误之后,上传本次任务的航线数据传输至 无人机的飞控系统,然后开始航拍工作,过程中需要时刻 注意无人机的飞行状态,出现问题迅速解决,解决不了时 及时将无人机召回。
2.2.3 数据检查
无人机在空中的飞行作业容易受到各种各样的影响。 例如风速过大、云雾遮挡、降雨等天气情况,还有可能存在 的空中障碍(如电缆、树枝等),往往使得飞行航线偏移规 划航线,影响采集影像数据的质量,最终影响成图结果的 精准程度。因此,在无人机航拍任务结束后,需要对影像数 据的质量进行检查,确保其精度满足要求。
2.2.4 数据处理
①影像数据预处理:由于航摄时顺光和逆光差异导致 照片的饱和度、色相及亮度均不一致,因此拍摄的照片需 通过与相机配套的专业软件进行匀光、匀色预处理,形成 最佳影像数据。②POS 数据预处理:POS 原始数据,利用软 件选择该架次距离摄区最近的基站数据进行解算,按照载 波相位测量差分 GPS(DGPS)定位技术,定位每张照片曝 光时机载 GPS 的 WGS84 框架坐标,利用 CQG2000 模型 加地方重力改正拟合高程;再将 GPS 数据和 IMU 数据进 行联合处理,针对项目成果需要的投影和坐标系统,经过 参数转换,纳入偏心角改正后,解算出每张像片的 6 个外 方位元素。③三维建模:无人机采集的倾斜摄影数据可通 过 Context Capture Center、Photo Scan 等软件进行处理。由 于 Context Capture Center 可以进行集群运算(多台机器同 时计算),可以有效减少数据处理时间,因此建议用 Context Capture Center 进行处理。倾斜摄影可生成三维模 型,同时还能生成 DOM 和 DSM,通过专业软件处理可产 生 DEM 和 DLG。
3 实例探析无人机航测在水利工程中的应用
3.1 研究区概况
某水库工程控制约 34000km2 的流域,水利总库容为 19 亿 m3 ,年均发电量可达 5.55 亿千瓦时,库区处于丘陵 地带,周围的陆地地区地形起伏变化较大,最高海拔约为 734m,最低海拔约为 8m。为实现水库初步划界,获取无人 机航测规划的参考边界,本文将获取的 WorldView-2 影像 作为基础数据,为水库整体情况摸查提供完整的遥感数 据,也为无人机航测提供准确的前期参考,此外由于水库 面积较大,违法违章嫌疑案例较为分散,因此选取合适的 水库示范区,利用 FCN 进行违法违章嫌疑区的智能化提 取(见图 2)。
3.2 无人机航测技术的应用情况
3.2.1 野外工作
本工程采用大疆精灵系列无人机多旋翼飞行平台拍 摄水库的影像。该机型在平原和丘陵地带的平整地面均可 起飞、安全灵活;影像地面分辨率优于 0.05m,航向重叠度 为 65%~80%,旁向重叠度为 60%~70%,相对航高设置不 高于 200m。由于海拔高差相差较大,最高可至 700 多 m, 最低处小于 10m,因此将水库分为丘陵和平原两种情况进 行航测飞行,丘陵地区重叠度较低,相对航高设置也较高, 地面分辨率较平原地区低。由于经费、人力等条件限制,本 次航测计划选取大于水库管理区范围、小于保护区外边 界、面积约为 700km2 的区域作业,实际航测面积约为 750km2 ,正射影像的地理坐标系采用 CGCS2000,投影采用 高斯-克吕格投影的 3°分带,数字高程模型采用 1985 国家高程基准。
3.2.2 水库确界
①水库管理区范围和保护区范围的初步划定。本文根 据水文分析提取了水库集水线和集水区域,并将其与初步 划定的管理区边界相交的集水区外边界作为保护范围外 边界,而初步划定的管理区边界与该保护范围外边界之间 的区域即为初步界定的水库保护区范围。初步划定的水库 总面积约为 1800km2 ,该范围过大、实际航测耗费时间较 长,由于经费有限,因此在保护区外边界范围内选定 700km2 的区域进行无人机航测作业,该区域完全覆盖管 理区范围,充分满足管理区确界需求。 ②水库管理区范围和保护区范围的最终确界。通过内 业数据处理的相关步骤,对无人机拍摄的高分辨率影像进行 拼接、融合、控制点刺点纠正,分别生产 1∶2000 的水库正射 影像图和数字高程模型。 基于无人机数据生产的高分辨率数字高程模型,通过 高程线提取、水文分析得到最终确界结果如图 3 所示,统 计指标如表 1 所示,可以看出,虽然管理区范围大于初步 划定的管理区,但此次无人机航测范围仍满足水库管理区 范围的确界需求;初步划定的管理区与最终划定的管理区 范围整体上较为相似,但最终划定的管理区范围边长是初 步划定的管理区范围边长的两倍以上,说明最终确界的管 理区边界在细节上更为精细。对比初步确界和最终确界的 管理区边界可知,主干流域大部分都被划入管理区范围,但 最终确界的管理区边界在细节上更加贴合流域边界;而在 支流部分,初步确界的管理区边界虽然更为平滑,但部分流 域未完整划入管理区范围,且无人机航测数据的空间分辨 率更高,最终确界的管理区边界比初步确界结果更准确。
3.2.3 水库示范区违法违章嫌疑区解译
基于无人机航测的水库示范区的正射影像,利用 FCN 中的 FCN-16 模型实现该示范区的影像分类。首先制作绘 制标签,通过 256×256 滑动窗口,以 100 的步长进行剪裁, 得到 8791 张样本,为减少训练样本对人工的依赖,再将所 有样本分别进行镜像翻转以及 90°、180°和 270°三个方向 的旋转,通过数据增强的方式扩大样本量,最终得到 43955 张原始图像和对应样本,其中随机选取 35164 张用 于训练,其余 8791 张用于验证。 将训练模型应用至分类中,得到水库示范 区的分类图,裸地、建筑、道路、船只、植被和水体 6 种地物均可被分类模型识别出来,分类结果具 有较高的精度,可用于分析和进一步应用。基于分 类结果,结合确界数据,提取得到示范区的违法违 章嫌疑区共计 30 处,主要集中在北江沿岸两侧以 及支流的水面,其中数量最多的是网箱养鱼和开 垦两类嫌疑区;北江沿岸两侧存在 14 处违法违章 嫌疑区,主要为开垦和库区河鲜船,北江西侧存在 一个较大的采砂场;支流存在 16 处违法违章嫌疑 区,靠近北江的流域水面存在大量网箱养鱼的情 况,接近支流末端的违法违章嫌疑区主要为开垦。
4 结语
综上所述,在水利工程领域中,利用无人机获 取的测量成果可反映工程区地表情况和地质状 况,从不同方位反映物体的形状、大小和高差,使 相关工作人员可准确全面掌握工程全貌全局,得到细部点 的高精度空间关系。工程实践中无人机航测技术的应用会 涉及很多专业知识,比如各种参数设置、无人机设备等,这 就需要在实践中不断总结经验,从而让无人机技术更好地 服务于水利测绘工作。
作者:李向东